Micro/Nano – Robotics & Mechatronics
Adaptive Q-control for Nano Scanning
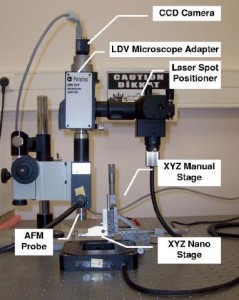
A new scanning approach, called Adaptive Q-control, for tapping-mode Atomic Force Microscopy (AFM) is introduced and implemented on the experimental set-up shown below. In the standard Q-control, the effective Q-factor of the AFM probe is adjusted prior to the scanning nano-scale surfaces. However, there is a trade-off in setting the effective Q-factor of an AFM probe: the Q-factor is either increased to reduce the tapping forces or decreased to increase the maximum achievable scan speed. Realizing these two benefits simultaneously using the standard Q-control is not possible. In adaptive Q-control, the Q-factor of the probe is set to an initial value as in standard Q-control, but then modified on the fly during scanning when necessary to achieve those two benefits at the same time.
Numerical Simulation of Nano Scanning
We investigate nano scanning in tapping mode atomic force microscopy (AFM) under quality (Q) control via numerical simulations performed in Matlab/SIMULINK. We focus on the simulation of the whole scan process rather than the simulation of cantilever dynamics and the force interactions between the probe tip and the surface alone, as in most of the earlier numerical studies. This enables us to quantify the scan performance under Q control for different scan settings.
State Feedback Control for Adjusting the Dynamic Response of a Piezoactuated AFM probe
We adjust the transient dynamics of a piezoactuated bimorph atomic force microscopy AFM probe using a state feedback controller. This approach enables us to adjust the quality factor and the resonance frequency of the probe simultaneously to achieve the desired response.
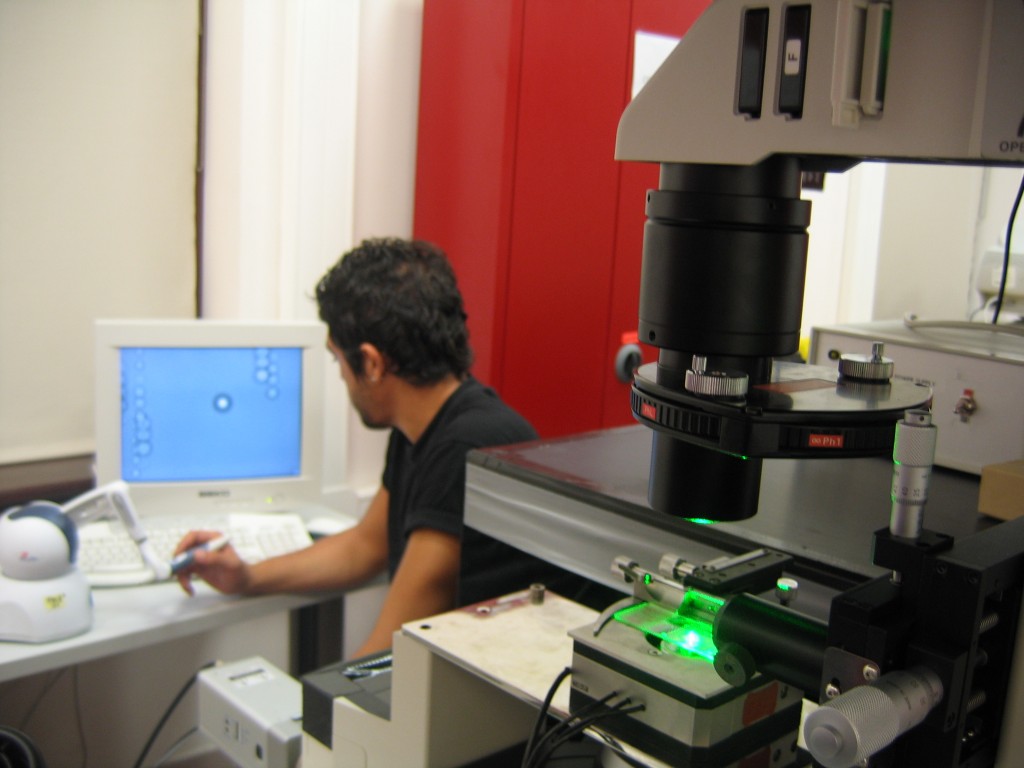
Haptic Tele-manipulation of Micro-scale Objects using Optical Tweezers
Using optical tweezers (OT) and a haptic device, microspheres having diameters ranging from 3 to 4 mm (floating in a fluid solution) are manipulated in order to form patterns of coupled optical microresonators by assembling the spheres via chemical binding. For this purpose, biotin-coated microspheres trapped by a laser beam are steered and chemically attached to an immobilized streptavidin-coated sphere (i.e., the anchor sphere) one by one using an xyz piezo scanner controlled by a haptic device. To our knowledge, this is the first time that a haptic device is coupled with OTs to guide the user during an optical manipulation task involving steering and assembly of microspheres to construct a coupled microresonator.
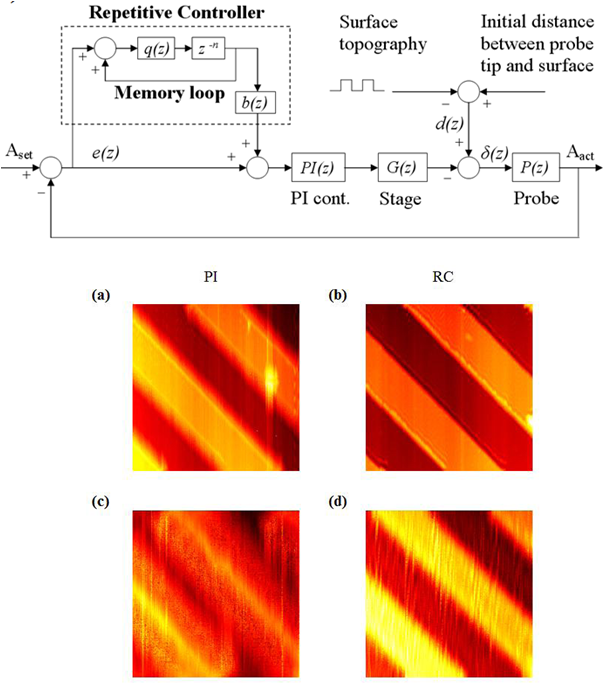
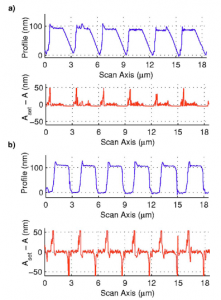
A Robust Repetitive Controller for Fast Nano Imaging
Increasing the scanning speed and reducing the interaction forces between the probe’s tip and the sample surface are still the two main challenges in nano-scanning. To meet these challenges, we take advantage of the fact that the lateral movements performed during an Atomic Force Microscopy (AFM) scan is a repetitive motion and propose a Repetitive Controller (RC) for the z-axis movements of the piezo-scanner. The RC utilizes the profile of the previous scan line while scanning the current line to achieve a better scan performance. The results of the scanning experiments performed with our AFM set-up show that the proposed RC significantly outperforms a conventional PI controller that is typically used for the same task. The scan error and the average tapping forces are reduced by 66% and 58%, respectively when the scan speed is increased by 7-fold.