Bio – Robotics & Mechatronics
Robotic Indenter for In-vivo Characterisation of Static and Viscoelastic Material Properties of Soft Organ Tissues
The lack of experimental data in current literature on material properties of soft organ tissues in living condition has been a significant obstacle in the development of realistic soft tissue models for virtual reality based surgical simulators and medical robotic systems. However, collecting data from live organ tissues in situ is a highly challenging task for several reasons. We developed a robotic indenter to measure soft tissue properties in abdominal region during a laparoscopic surgery. Using the robotic indenter, force versus displacement and force versus time responses of pig liver under static and dynamic loading conditions were successfully measured in collaboration with medical staff from Istanbul University Medical School to characterize its material properties.


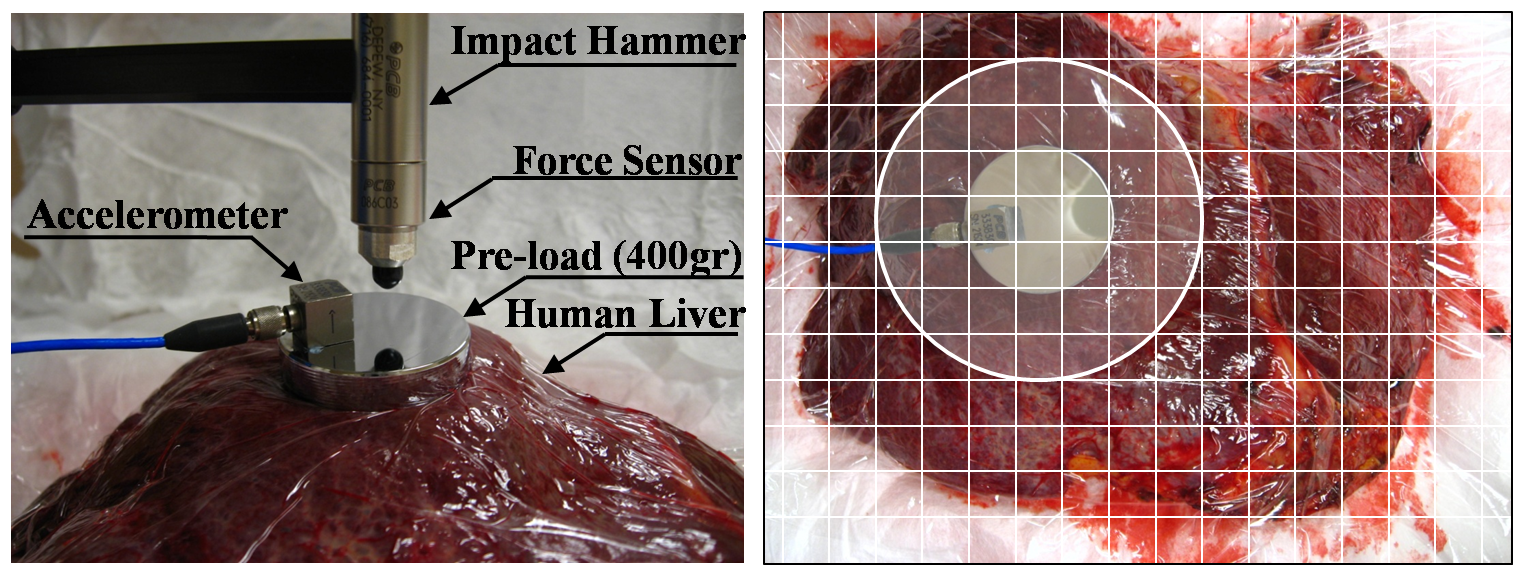
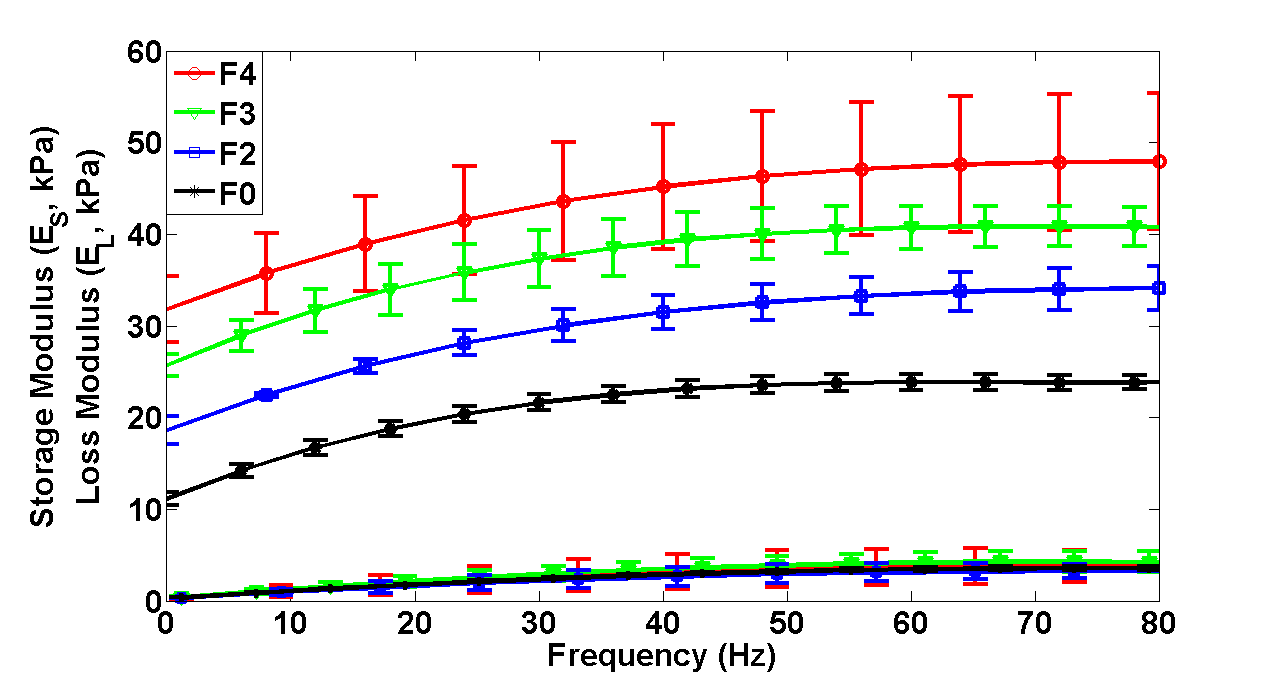
Biomechanical Characterization of Frequency-Dependent Material Properties of Soft Organ Tissues Using Impact Hammer
The current methods for characterization of frequency-dependent material properties of human liver are very limited. In fact, there is almost no data available in the literature showing the variation in dynamic elastic modulus of healthy or diseased human liver as a function of excitation frequency. We show that frequency-dependent dynamic material properties of a whole human liver can be easily and efficiently characterized by an impact hammer. The procedure only involves a light impact force applied to the tested liver by a hand-held hammer. The results of our experiments conducted with 15 human livers harvested from the patients having some form of liver disease show that the proposed approach can successfully differentiate the level of fibrosis in human liver.
A Novel Tactile Sensor for Detecting Lumps in Breast Tissue
In collaboration with Prof. B. Guclu of Bogazici University, we developed a compact tactile sensor in order to guide the clinician or the self-user for non-invasive detection of lumps. The new design has an advantage over the existing discrete tactile sensors and detection methods by efficiently sensing force distribution over an area without any side effects. The sensor consists of 10×10 infrared emitter-detector pairs, a silicon-rubber elastic pad, and a contoured tactile interface (25×21 moving pins) for palpating three dimensional objects.
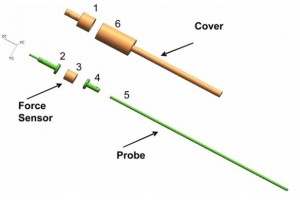
Biomechanical Modeling of Soft Tissue Puncturing/Cutting
We investigate the force interactions between a sharp probe/needle and soft tissue with applications to surgical simulation, computer-aided surgical planning, and medical robotics. In our approach, we first measure the interaction forces between a sharp probe and soft tissue using an experimental set-up. The main components of this set-up include a force sensor for measuring the interaction forces and a lead screw mechanism powered by a step motor for guiding the probe into the tissue. Using this set-up, we record the changes in puncturing forces as a function of the probe position and estimate the fracture toughness of the tissue. We then compare our experimental results with the results of a finite element model constructed in ANSYS.

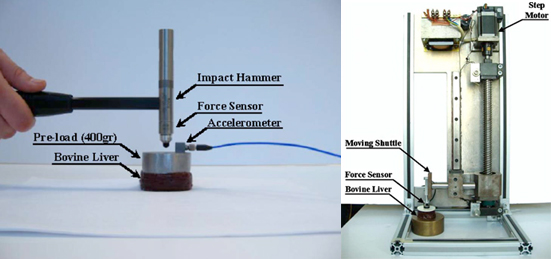
Effect of Preservation Period on the Viscoelastic Material Properties of Soft Tissues with Implications for Liver Transplantation
The liver harvested from a donor must be preserved and transported to a suitable recipient immediately for a successful liver transplantation. In this process, the preservation period is the most critical, since it is the longest and most tissue damage occurs during this period due to the reduced blood supply to the harvested liver and the change in its temperature. We investigate the effect of preservation period on the dynamic material properties of bovine liver using a viscoelastic model derived from both impact and ramp and hold experiments. First, we measure the storage and loss moduli of bovine liver as a function of excitation frequency using an impact hammer. Second, its time-dependent relaxation modulus is measured separately through ramp and hold experiments performed by a compression device. Third, a Maxwell solid model that successfully imitates the frequency- and time-dependent dynamic responses of bovine liver is developed to estimate the optimum viscoelastic material coefficients by minimizing the error between the experimental data and the corresponding values generated by the model. Finally, the variation in the viscoelastic material coefficients of bovine liver are investigated as a function of preservation period for the liver samples tested 1 h, 2 h, 4 h, 8 h, 12 h, 24 h, 36 h, and 48 h after harvesting. The results of our experiments performed with three animals show that the liver tissue becomes stiffer and more viscous as it spends more time in the preservation cycle.